

Die Saison 2012 ist vorbei, in meinen Augen war sie sehr gut! Nur ein kleiner Crash ist zu verbuchen.
Bis April flog ich den T-Rex 450 dann kam die Bauphase des LionBit 465. Bis Dezember 2012 hat die neue Maschine 50 Flüge und war dabei 09:06:25 Stunden in der Luft.
Zum Schluss der Saison habe ich neue Moves probiert unter anderem Rainbows und Tic-Tocs. Bei diesen Figuren fiel mir auf dass das Heck nicht sauber entgegen wirkt wenn harte Pitchwechsel das Heck belasten. Auch bei den Speedflügen gab es manchmal Situationen wo die Taumelscheibenservos an der Belastungsgrenze waren und die Steuerbarkeit teilweise erheblich gelitten hat.
Eine mögliche Ursache kann die sehr niedrige Stromversorgung der Servos sein. Das BEC das im YGE100V4 Regler verbaut ist liefert nur 5,5V und 3A Dauer. Das ist sicherlich zu wenig für 4 hungrige Servos die teilweise gleichzeitig sehr viel Strom brauchen um ihre Stellungen anzufahren und zu halten.
Aus diesem Grund wird die erste Tuningmasnahme ein externes und auch leistungsstärkeres BEC sein:
 Das Gryphon Polaris GSR-3030 BEC
Das Gryphon Polaris GSR-3030 BEC

ist ein superleichtes (7gr) BEC mit 3-7S Input und einstellbarem Output.
Der Strom der hier ausgegeben wird wird bei mindestens 6A Dauer sein und für meine Zwecke völlig ausreichend. Die Spannung wird auf 6V Eingestellt damit die Servos ihre maximale Geschwindigkeit und Kraft entfalten können. Das BEC wird vom 4S Flugakku gespeist um einen zusätzlichen Ballast (Empfängerakku) zu vermeiden.
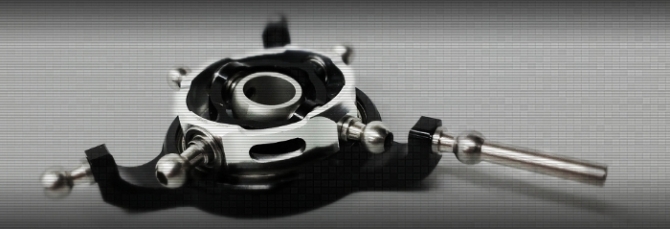
 Die HeliOption Ball bearing Gimbal Swash
Die HeliOption Ball bearing Gimbal Swash

ist eine Tuning-Taumelscheibe mit einem kugel gelagertem "Gimbal"
Sie wird die Align Taumelscheibe ersetzen die schon von Anfang an recht viel Spiel hatte. Das gute Stück lag zusammen mit der BEC unter dem Weihnachtsbaum.
 Der Spektrum AR8000 Empfänger
Der Spektrum AR8000 Empfänger

mit seinem Satelliten ist das passende Gegenstück zum neuem Sender. Die alte DX6i wird in den Ruhestand geschickt und von der DX7s abgelöst. Grund für dieses Upgrade ist: Ich will Telemetrie! Die LEDs am LiPoMonII sind zwar gut und immer sichtbar aber wenn die LEDs mir das Ende der LiPos anzeigen bleibt wirklich nicht viel Zeit um die Maschine mit Drehzahl sicher zu landen. 6 ungeplante Autorotationslandungen musste ich 2012 meistern und das will ich unbedingt abstellen. Nach Timer zu fliegen bringt nichts denn die Flugzeiten schwanken je nach Flugstil und Drehzahl zwischen 7 und 14 Minuten. Eine Spannungsüberwachung mit rechtzeitiger Warnung per Piepton und/oder Vibrationsalarm am Sender ist doch sehr viel eindeutiger als ständig nach den Blinksignalen der LEDs zu schauen...
Das war es vorerst, jetzt muss alles noch eingebaut werden. Hoffentlich wird das Wetter demnächst besser.

